Two four-legged robots recently explored a practice Mars yard, with a little help from an astronaut in space and several robot buddies.
The robot team, along with the "Neal AI" chatbot and NASA astronaut Jonny Kim, worked together on tough tasks in a German site meant to simulate Mars terrain.
Kim took command of all four robots in July while orbiting Earth on the International Space Station (ISS). He beamed commands to a German space agency (DLR) facility in Oberpfaffenhofen, near Munich, to see how well the team could solve problems on the go.
The experiment's result? Enthusiasm.
"We have now achieved all the technical requirements for controlling complex robotic missions on Mars — and for a future permanent lunar research station," Alin Albu-Schäffer, director of DLR's institute of robotics and mechatronics, said in a statement.
Germany is a signatory of NASA's Artemis Accords, which involve a group of space-faring nations interested in exploring the moon — and doing so under norms established by the U.S. The moon has long been seen as an eventual stepping stone to Mars and, under the Trump administration, the Red Planet has come under even sharper focus.

Europe could be part of this picture as well. The DLR Surface Avatar experiment has been recruiting robots and astronauts since 2022. July's excursion was the fourth and final in the series of exercises. Past ISS residents such as NASA astronaut Frank Rubio and Swedish project astronaut Marcus Wandt were among those controlling robots here on Earth.
Kim's work was even more difficult than that of his predecessors. For example, he had to help "rescue" Bert, who had a simulated leg injury: The experiment team deliberately jammed one of the robot's four legs.
"To find a stable gait for Bert with three legs, Jonny Kim conducted a 'training' session: he had the robot try out different gaits, and evaluated them, until Bert found a functioning three-legged strategy," DLR officials said in the statement.
Once Bert and Kim felt ready to keep going, the robot carried out its mission of exploring a series of Martian caves with mysterious drawings inside, which looked a little like the famed prehistoric art found in the Lascaux caves in France.

Given the tight quarters in the cave, Kim switched to manual control. "He could see what the robot was seeing through Bert's camera eyes, controlling it remotely using the joystick on the robot command terminal," DLR officials wrote.
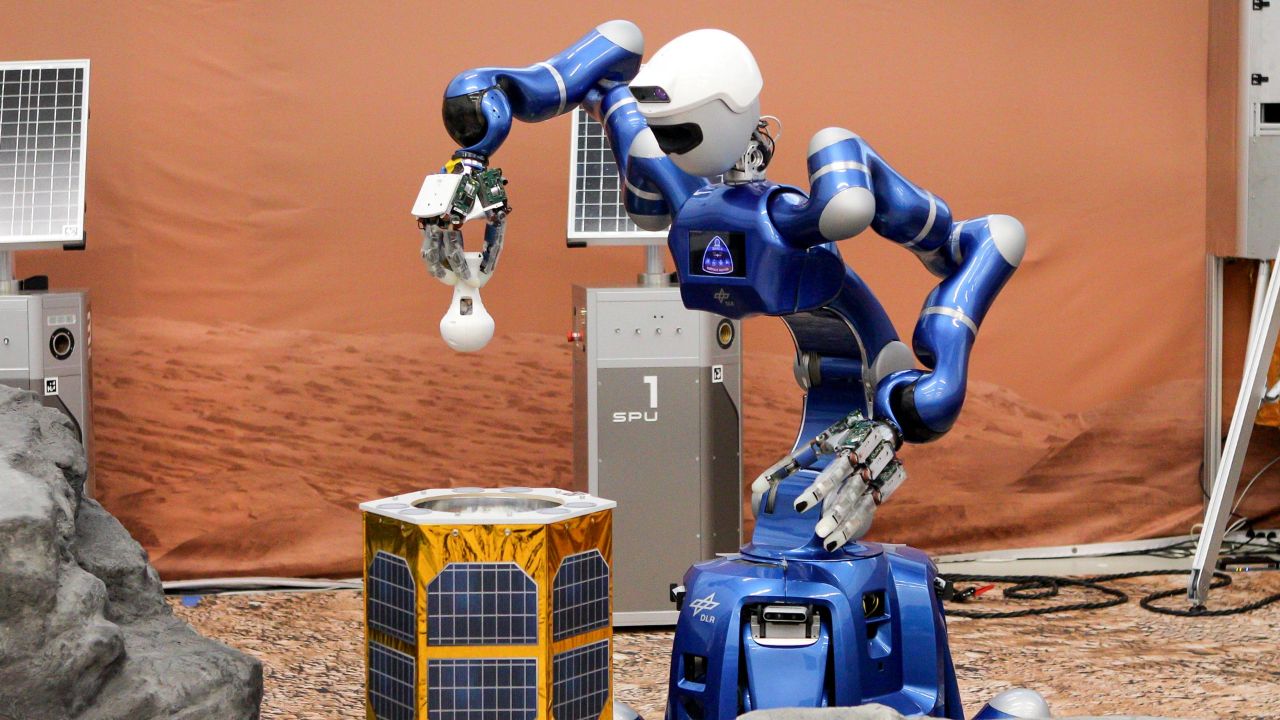
Alongside Bert were three other robots that Kim could use together or separately, and with as much automation as he wished: DLR's four-legged Spot, the agency's humanoid robot "Rollin' Justin," and the Interact rover from the European Space Agency. (Bert even rode on Interact in a transport basket, after Kim accomplished the world's first robot-to-robot transfer, according to DLR.)
Among the group, only Spot had never been used before in Surface Avatar. Neal AI, the chatbot, gave real-time support, answering Kim's questions during the excursion.
Despite being the rookie of the crew, Spot was a good robot. Following Kim's instructions, Spot found several "sample containers" in the facility and brought them to a transfer area, using a gripper arm. Next, Rollin' Justin sent them to a Martian-like lander. The duo even piled up several "Martian" samples on their own, while Kim worked on other tasks.
"By involving an astronaut in microgravity and using relay satellites, we have overcome the technical hurdles involved in the remote control of robots," Thomas Krüger, team lead at ESA's human-robot interaction lab, said in the statement. Kruger noted that the experiments could also be useful for Gateway, NASA's planned moon-orbiting space station that's designed to support crewed and robotic Artemis missions on the lunar surface.
Kim capped the excursion by shaking hands — from orbit — with Germany-bound Neal Lii, a DLR scientist and principal investigator of Surface Avatar. (In the release, DLR did not specify whether Neal AI took its name from the human Neal.)
Rollin' Justin gave Lii and Kim a literal hand, using force feedback "to convey the force and movement of the handshake to both experiment partners," DLR officials wrote of the "emotional" moment.







