Nvidia has showcased agentic robots that can teach themselves high-precision and dexterous tasks in the real world. As part of the demo reel for this ENPIRE technology, we see a room full of robots do things like pick up and slot a graphics card in a motherboard, as well as sort metal pins in a container, and manipulate and correctly cut zipties. Jim Fan, Nvidia’s Director of AI & Distinguished Scientist, said that this demo shows researchers can “enable AutoResearch in the physical world for the first time!”
Fan explains that the ENPIRE project gave 8 Codex agents a fleet of robots, an allocation of GPUs, and a generous token budget. Then the agents were given a task to solve as quickly as possible, without making mistakes. Once instructed, “The robot fleet starts to come alive: they learn to look for visual clues, reset the scene, practice novel skills, tinker with control stack, read papers online, debate, reflect, get stuck, and try again directly on the hardware,” explains the Stanford-based scientist. “All we did is giving Codex an API to the world of atoms, and the rest is emergence.”
ENPIRE
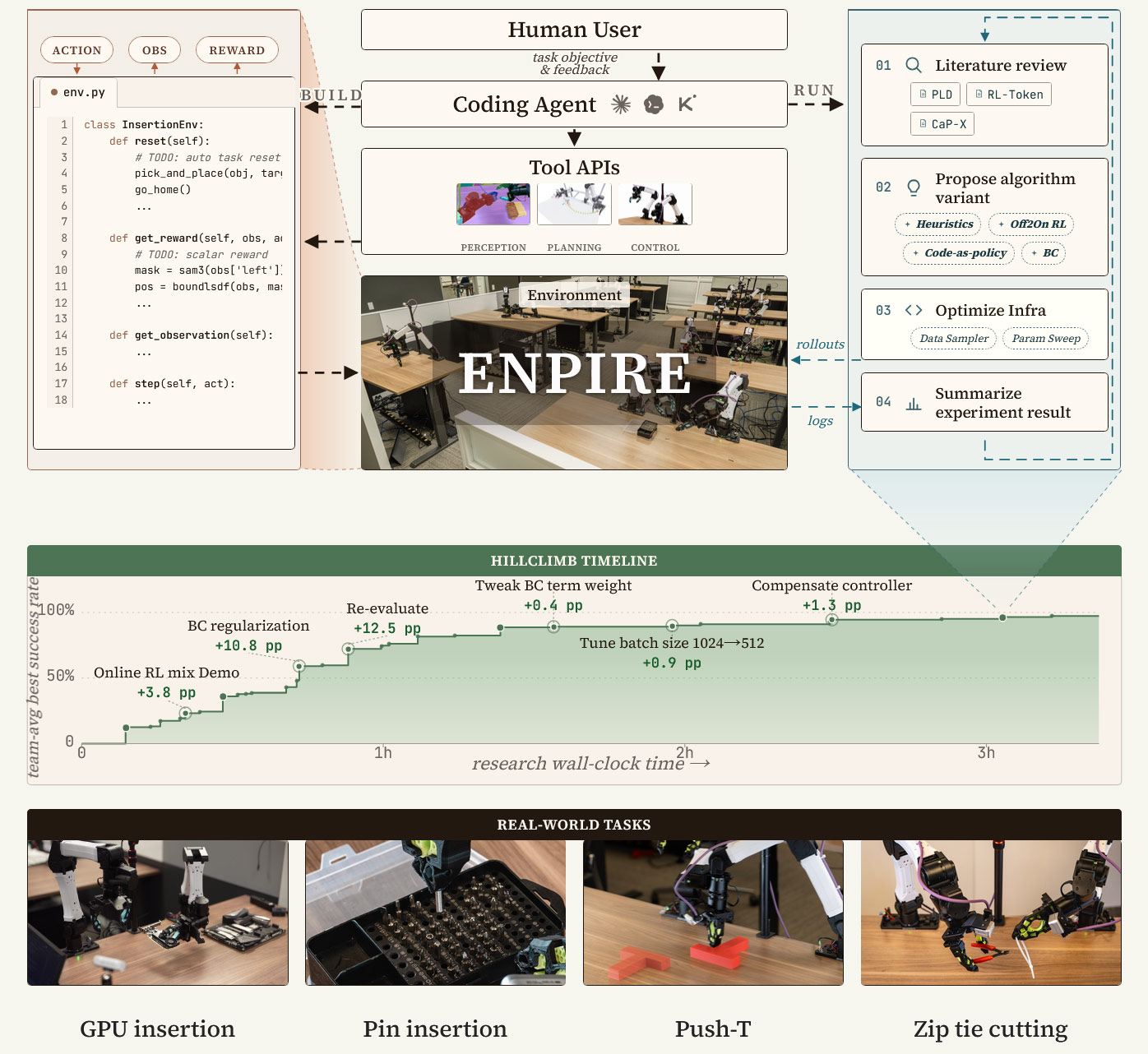
"ENPIRE, a harness framework for coding agents that instantiates this physical feedback routine with four core modules: an Environment module (EN) for automatic reset and verification, a Policy Improvement module (PI) that launches policy refinement, a Rollout module (R) to evaluate policies with single or multiple physical robots operating in parallel, and an Evolution module (E) in which coding agents analyze logs, consult literature, improve training infrastructure and algorithm code to address failure modes."
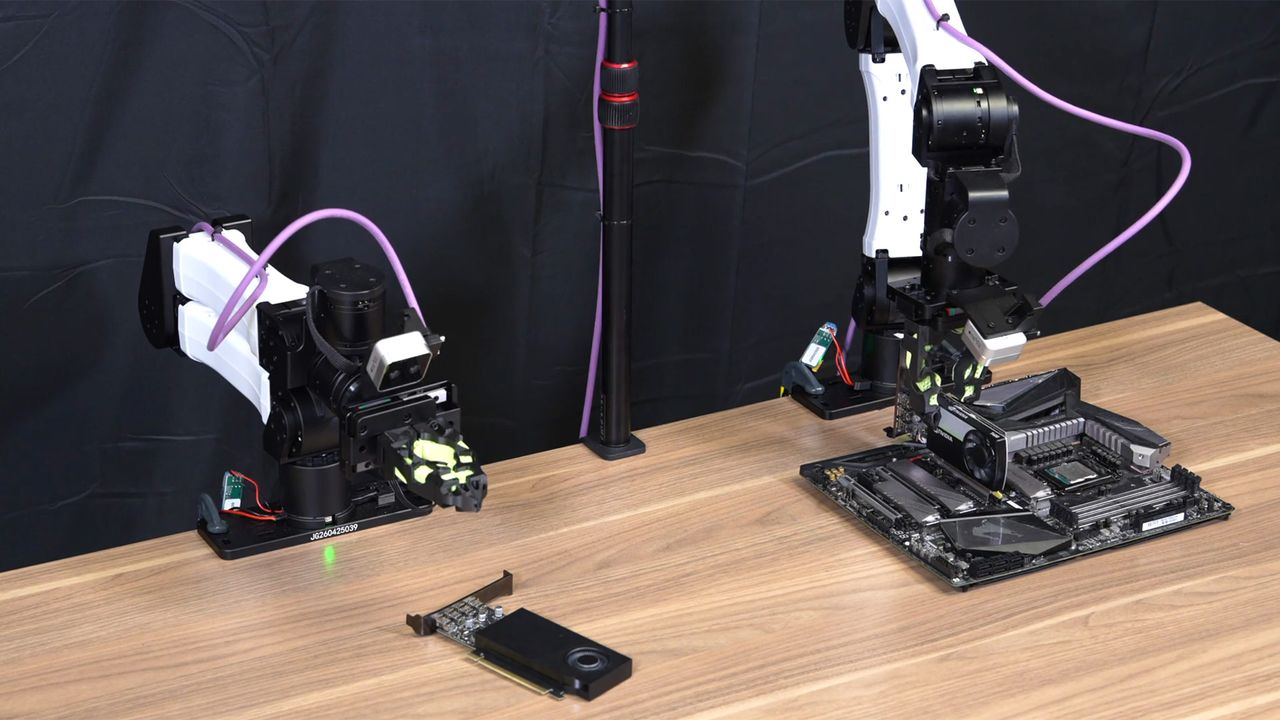
We were most interested to see a robot “installing GPUs all by itself.” In the brief recording of this particular PC DIY task, you can see one robot arm select and pass a graphics card to another with a motherboard in front of it. The second arm then carefully positions the PCIe slot of the card to align it with the motherboard slot, gently descends, and pushes it into place. It seesawed a bit on insertion, but we guess it would have been fine. Other AutoResearch projects the robots were set to do included organizing fine pins, plus tying and cutting zipties.
In the associated ENPIRE: Agentic Robot Policy Self-Improvement in the Real World research paper, you can learn more about the techniques behind this demo. You can also see the comparison test results when different coding agents were used, including Codex with GPT-5.5, Claude Code with Opus 4.7, and Kimi Code with Kimi K2.6. The researchers also tested scaling up the robot fleet, concluding that “eight robots exploring in parallel solves the task significantly faster than fewer ones.” Fan joked that the goal is to train up the robots, then everyone goes on holiday, “and Jensen wouldn't even notice ;)”